Autonomous Car Research at Cornell


I worked on autonomous car research my Senior year at Cornell where I integrated a MobilEye vision sensor into an autonomous car to detect nearby vehicles, lanes, and pedestrians.
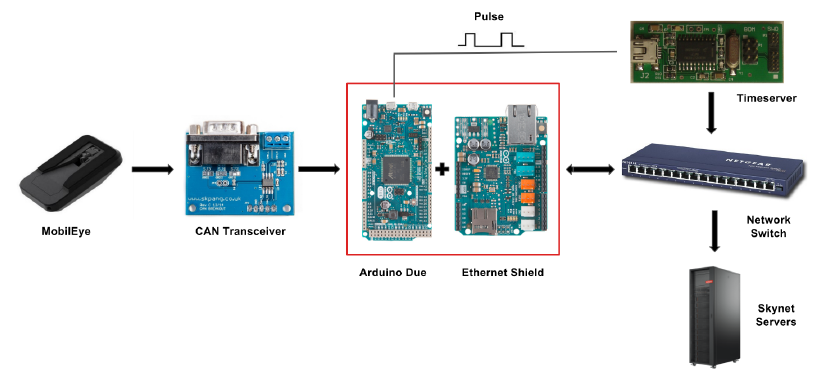
MobileEye is a single camera sensor that is placed on the windshield of a car and uses computer vision to detect nearby objects and lanes. The data can then be transmitted to a microcontroller using the CAN bus format (Controller Area Network) - a data protocol used by vehicles. MobilEye cameras were also previously used by Teslas for autonomous driving.
The goal of my research was to implement the MobilEye camera into Cornell's autonomous car (Skynet) that had competed in and finished the DARPA 2007 Urban Challenge.
The objective was comprised of the following:
- Develop a system to integrate the sensor with the car
- Ensure data from MobilEye came through completely and accurately
- Parse the MobilEye data and send it to the autonomous car's algorithms
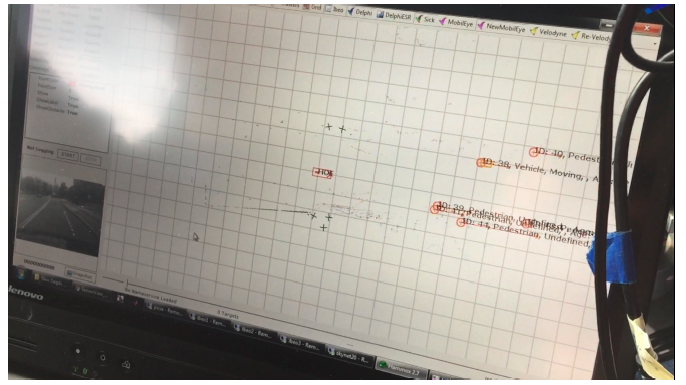
- Embed the data into the autonomous car and display it on the panel
Ultimately, I used an Arduino Due and a CAN bus transmitter to retrieve data from the MobilEye camera. Once the MobilEye data was collected by the Arduino Due, it was parsed with data from the car so that the data format was consistent with other sensor data. The parsed MobilEye data was then sent to a monitor panel that would display the data as visual markings along with data from other sensors in the car.